
Research Focus
Soft and Biologically-inspired Robots
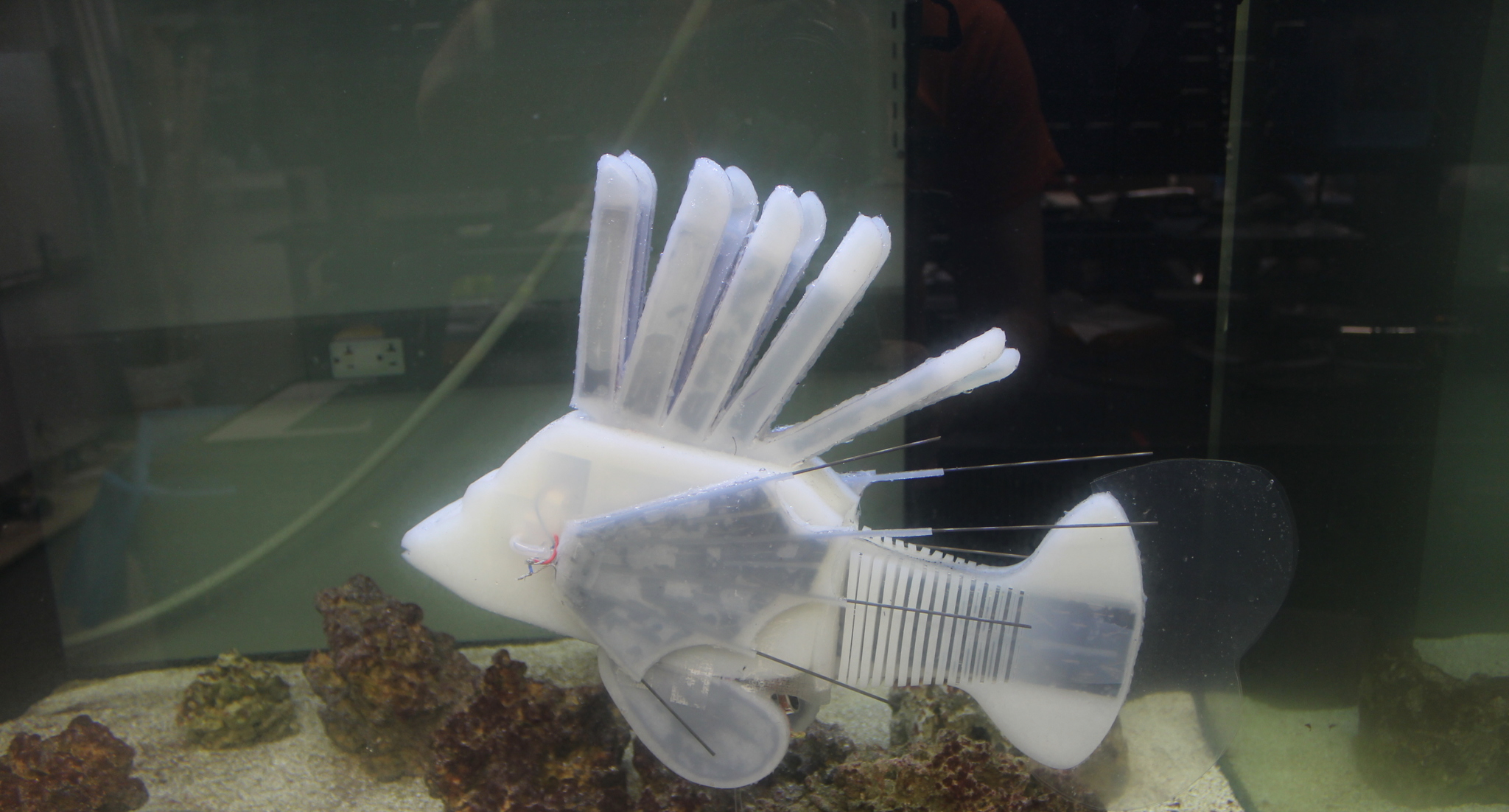
We often turn to nature when optimizing our designs for real-world applications. In our lab, this process can take several forms: (i) Leveraging biologically-inspired form factors to produce technologies that are more efficient or adaptable in open-world environments; (ii) Developing soft materials and compliant devices to replicate the capabilities of humans and other organisms (e.g., tactile sensing, muscle-like actuation); (iii) Exploring biohybrid or bio-symbiotic approaches to robotic technologies.

Insect-scale Robots
We are interested in developing centi-, milli-, and microscale actuators for use in small robots and devices. In particular, we are pursuing new avenues for energy storage and power delivery at this scale in an effort to produce high-performance (high force, displacement, frequency, and power density) actuators and, eventually, untethered insect-sized robots.

Embodied Energy
Modern robots lack the combination of endurance (the ability to operate for long durations) and adaptability (the ability to perform a multitude of life-sustaining functions across different environments) that we see in living organisms. One explanation for this phenomenon is that robots are typically composed of individual power, actuation, sensory, and control “blocks”, each existing as separate materials and optimized for different tasks. Conversely, biological systems are deeply interconnected and store energy at all organizational levels, enabling increased complexity and mutifunctionality. One of our major research goals is the development of materials and technologies that blur the lines between these mono-functional robot “blocks”, while also granting them the capacity for energy storage or energy harvesting.